C-ITS: Cooperative Intelligent Transport Systems and Services
Cooperative Intelligent Transport Systems (C-ITS) refers to transport systems, where the cooperation between two or more ITS sub-systems (personal, vehicle, roadside and central) enables and provides an ITS service that offers better quality and an enhanced service level, compared to the same ITS service provided by only one of the ITS sub-systems.
According to the C-ITS Deployment Platform having been organised by the European Commission, cooperative Intelligent Transport Systems (C-ITS) shall use mature ad-hoc short-range (like ETSI ITS G5) and complementing wide-area communication technologies (like 3G, 4G, future 5G) that allow road vehicles to communicate with other vehicles, traffic signals, roadside infrastructure and other road users. The cooperative V2X systems are also known as vehicle-to-vehicle communications (V2V), vehicle-to-infrastructure communications (V2I) or vehicle-to-person (V2P) communications. [C-ITS Platform Final Report] In summary, the wireless data exchange between the different actors and ITS stations and related functions are named cooperative V2X communication. It supports a number of information, warning and assistance services which will be gradually deployed in coordinated innovation phases during the oncoming years.
ETSI ITS G5 is a cooperative V2X communication technology based on available and proven technologies offering seamless evolution
The CAR 2 CAR Communication Consortium members build their C-ITS deployment plans on cooperative V2X short-range communications that performs everywhere at any time via local ad-hoc networks in the 5.9 GHz band. This so called cooperative V2X communication uses the European standard ETSI ITS G5 which is based on the US market IEEE 802.11p WLAN standard especially designed for automotive applications. The successor standard IEEE 802.11bd offers improved performance and a seamless evolution of the radio technology which ensures efficient use of the allocated spectrum, continuous operation of implemented services and by this safeguarding of investments already taken. In comparison with other communication technologies, ETSI ITS G5 displays some features well designed for safety-related applications: a. o. locally self-organising ad-hoc networks, performing everywhere at any time, data transmission for free (not requiring subscription), robustness, fulfilling functional safety requirements and independence of third-party commercial driven decisions and of other commercial communication networks. The limited communication range of ETSI ITS G5 additionally supports the design features for meeting the privacy requirements considering the European GDPR. Furthermore, the Consortium and the developed cooperative V2X systems are committed to the provision of mitigation of interference with other existing communication systems (e.g. tolling, urban rail) used in neighboured channels of the allocated ITS spectrum at 5.9 GHz.
The automotive Intelligent Transport Systems (ITS) standards are developed and maintained by the European Standardisation Organisation ETSI TC ITS. All released standards are published on the website of ETSI TC ITS Committee. The most important standards for interoperability are released as European Norms.
For wide area communication, other types of networks and technologies provide advantages. Hence, in terms of a hybrid approach, ETSI ITS G5 can be complemented with other mature communications like cellular systems (3G, 4G, or 5G) and broadcast systems (RDS-TMC, DAB+). The explanation video of DATEX II outlines this approach from the road operators´ view.
Data exchange via cooperative V2X ad-hoc network
In a cooperative road traffic scenario, cooperative V2X communication units – so called ITS stations – are implemented in vehicles and traffic infrastructure, and exchange data with each other via the cooperative V2X short-range ad-hoc network. Multiple times per second, on-board units in the vehicles communicate data such as their position, speed and driving direction. Additionally, they send out event triggered messages about special incidents, such as an emergency braking, a vehicle defect or a slippery road detected. So-called roadside units in the traffic infrastructure inform e.g. about signal phases of traffic lights, speed limits or road works.
Thanks to the efforts of the CAR 2 CAR Communication Consortium, the data elements and formats of these messages are standardised and harmonised so that vehicles of different manufacturers and brands are able to communicate with each other also across borders. To ensure the privacy of the road users, the messages are anonymised by pseudonyms changing regularly avoiding long-term tracking. Security requires signing of the messages making them tamper proof.
Clear benefits for road safety and traffic efficiency and beyond
Cooperative V2X systems in vehicles analyse the data received and warn the driver against dangers, e.g. if they approach the end of a traffic jam or a construction site, if a vehicle in front suddenly brakes hard. This way, cooperative V2X systems support foresighted driving, display dangers not even visible to the driver and help to avoid accidents. For the driver, the data exchange remains completely unnoticed until a danger threatens. Cooperation between the road users e.g. for supporting lane merging will be enabled where required by future standardised message sets.
The cooperative V2X data exchange between the road users and with the infrastructure works anywhere and at every time where cooperative users come closer to each other. By reducing the distance between cooperative users, the quality of cooperative V2X communication improves. By this principle, critical road safety situations and resulting accidents can be avoided. Manually driven vehicles profit from cooperative V2X as well as all levels of assistance and automation up to fully self-driving cooperative automated vehicles.
Services such as providing information about traffic light signal phases and their predicted changes or barriers on the route in real time furthermore support smooth and comfortable travelling. By avoiding strong accelerations / decelerations, fuel / energy consumption of vehicles can be reduced with favoured effects on lowering noise and emissions. Sophisticated sensors of vehicles and in road infrastructure are able to detect other road participants. In case a detected road participant is not equipped with a cooperative V2X system cooperative Day 2+ systems will shared the object information via the collective perception message. Thus, cooperative V2X services are also linked to improvements in safety of vulnerable road users (VRUs), driving comfort, traffic efficiency and environmental effects of transport.
C-ITS Services
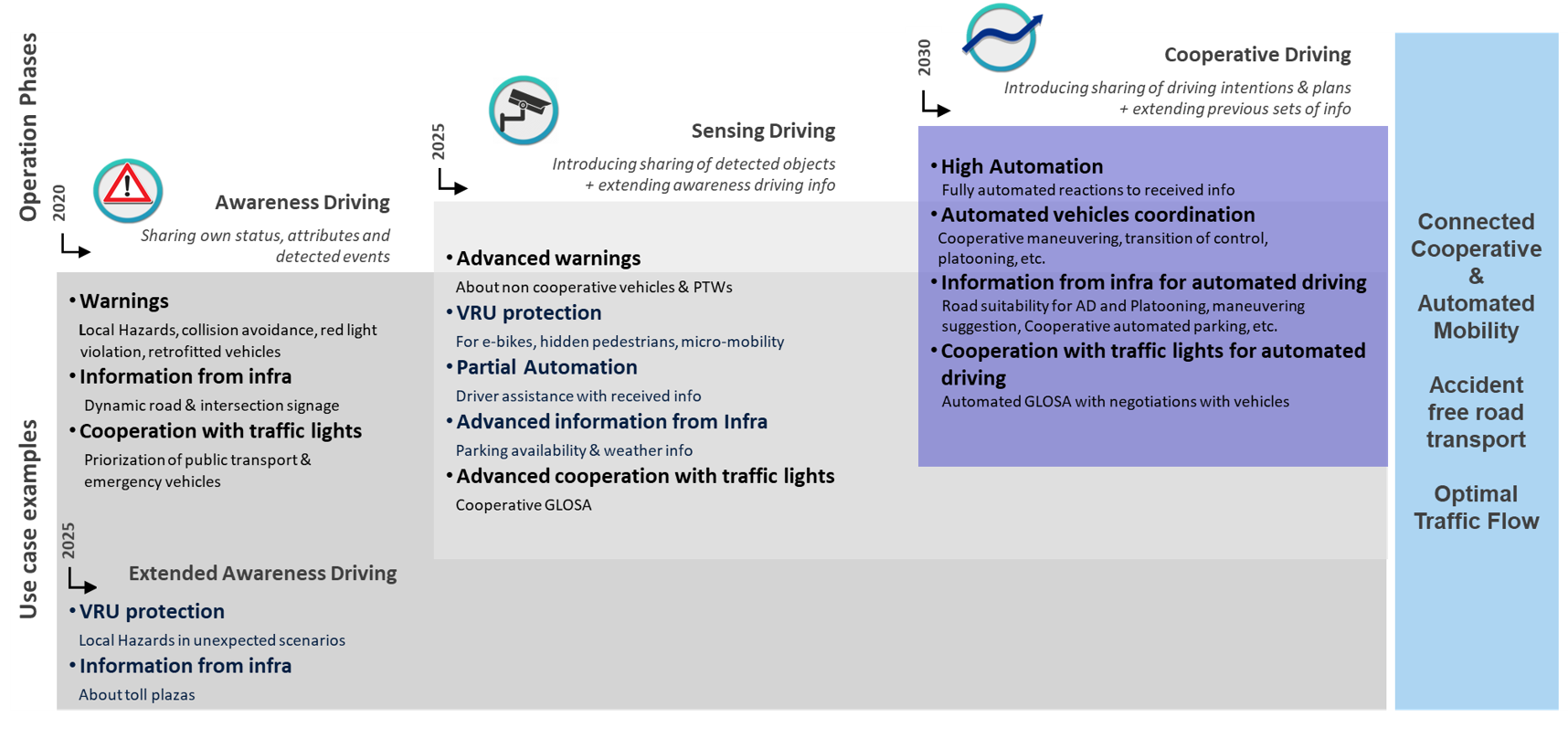
The CAR 2 CAR Communication Consortium is committed to saving lives by aiming to assist accident free traffic (vision zero) as soon as possible. For reaching this ambitious goal a service and use case roadmap clusters innovation phases building on each other and supporting all SAE levels of automation. Day 1 services focus on exchanging information enhancing foresighted driving. Day 2 services improve the service quality and share perception and awareness information. Day 3+ adds further sophisticated services like sharing intentions, supporting negotiation and cooperation that paves the way towards cooperative accident free automated driving.
The cooperative V2X services also enable truck platooning by allowing smaller headways between trucks for reducing air resistance and lowering fuel consumption. The principle of platooning can be applied on motorways but also at cooperative intersections in urban areas for increasing the throughput during the green phase of the traffic light signal.
Thanks to the work of the CAR 2 CAR Communication Consortium members, e.g. on open European standards for cooperative V2X communication, on specifications, on testing and validation procedures and on the security and privacy concept, the cooperative V2X communication system is mature and enables seamless evolution. The deployment of the cooperative V2X services proceeds in different innovation phases, starting with Day 1, a basic set of information and warning services support low penetration rates of C-ITS capable road users during the market introduction.
Day 1 services are being deployed and are already available in cooperative V2X vehicles on European roads. Services related to phases of Day 2 and Day 3+ are investigated in R&D projects that are generating the knowledge for developing related customised functions and standards. Having tested and demonstrated the new functionalities and enabling technologies, the innovations are fed into standardisation and profiling of the next deployment phase.
Some of the illustrations of use cases are shown below.
Awareness Driving
The exchange of status data via cooperative V2X communication, e. g. the position, speed, driving direction or special incidents like a vehicle defect, enables a set of information and warning services. They support road users in driving with foresight and get aware of potential risks which are not yet visible to them.
Examples are:
- Intersection Collision Warning
- Emergency Vehicle Warning
- Dangerous Situation Warning
- Stationary Vehicle Warning
- Traffic Jam warning
- Pre-/Postcrash Warning
Cooperative Driving
In addition to status and sensor data, cooperative V2X road users can also provide intention data, allowing them to interact intelligently and to coordinate their behaviour even in complex traffic situations. The prediction of expected behaviour of all road users is an important requirement for the long-term goal of highly automated and autonomous driving.
Examples are:
- (Static or dynamic) Platooning
- Area reservation
- Cooperative Merging
- Cooperative Lane Change
- Cooperative Overtaking
Sensing Driving
On top of status data, cooperative V2X capable road users can share observations gained by sensors, and advanced environmental information. This way, other traffic participants are not only warned against dangers they cannot perceive themselves yet; also, non-communicating road users are taken into account and protected in different traffic situations.
Examples are:
- Overtaking Warning
- Extended Intersection Collision Warning
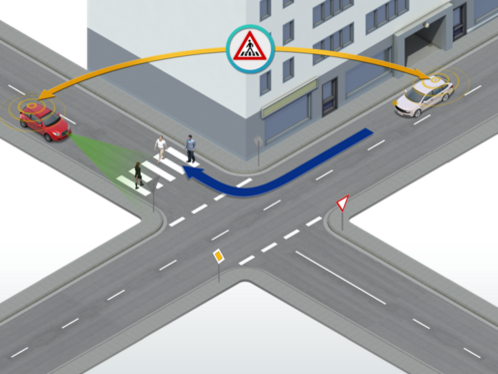
- Vulnerable Road User Warning
- Cooperative Adaptive Cruise Control
- Long-term Road Works Warning
- Special Vehicle Prioritisation
Deployment Status
The CAR 2 CAR Communication Consortium (C2C-CC) is progressing on reaching its goal of saving lives on its way towards assisting accident free traffic (vision zero) as soon as possible by enabling the highest safety level at improved traffic efficiency anywhere at any time without permanent costs to the users.
The definition and development phase for Day 2 of cooperative V2X services and technologies has been started and is ongoing. As of 2019, the first European vehicle manufacturers have started production of mass vehicle models equipped with standard Day 1 functionality based on cooperative V2X wireless ad-hoc communication technology ETSI ITS G5. This automotive C-ITS deployment has been complemented by more than 19 C-ITS infrastructure deployments of C-Roads pilots that are a joint initiative of European Member States and road operators for testing and implementing C-ITS services in light of cross-border harmonisation and interoperability.
This ongoing C-ITS deployment phase was prepared by a series of corridor projects and pilots forming the first examples of testing, proofing and demonstrating cooperative V2X under real traffic conditions in Europe. Test fields have been arising in different countries, pointedly equipping traffic infrastructure with ITS stations and proving cooperative V2X services under real traffic conditions with assistance of cooperative V2X capable vehicles fleets. Large scale field tests like simTD in Germany and the European DRIVE C2X project have proven the cooperative V2X functionalities, benefits and cross-border operation on proving grounds as well as on real roads. Such initiatives followed-up on R&D projects which during the past decades have investigated the potential impact and technical feasibility and the benefits of C-ITS with focus on ETSI ITS G5 based ad-hoc cooperative V2X communication to traffic safety, efficiency, driving comfort and automation.
Main initiatives supporting C-ITS Deployment in Europe
C-ITS Deployment Group
Companies, road operators and other organisations are committed to placing Europe at the forefront of development and deployment of CCAM relying on a strong regulatory framework. Deployment of C-ITS and ITS-G5 is progressing and therefore the first important step towards truly connected and automated driving has been taken.
C-ROADS
The C-Roads Platform is a joint initiative of European Member States and road operators (started 2016) for testing, implementing and operating C-ITS services with regard to cross-border interoperability and harmonisation of systems and services. The Platform works on harmonised specifications, links the national C-ROADS pilots and C-Roads urban nodes, supports transnational testing and service harmonisation, and conducts specific working groups on subjects such as organisational aspects, technical aspects and evaluation/assessment.
Amsterdam Group
The Amsterdam Group is a non-formal, strategic alliance of the CAR 2 CAR Communication Consortium, POLIS, ASECAP and CEDR. These umbrella organisations work together on improving road safety and mobility by fostering the joint European-wide deployment of C-ITS involving cooperative V2V and V2I communications.
CCAM - Cooperative, Connected and Automated Mobility
Since 2019 the European Commission organises regular CCAM Platform meetings. The six working groups focus on the European agenda for testing and exchange experiences and knowhow from pilots, demonstrations and large-scale trials, physical and digital road infrastructure, road safety, cybersecurity and issues related to Cooperative, Connected and Automated Mobility.
C-ITS Deployment Platform
The two phases of the C-ITS Deployment Platform have been organised by the European Commission from 2014 to 2017 with the goal of developing a shared vision on the interoperable deployment of C-ITS across Europe. Assisted by experts from the Commission, Members States, local and regional authorities, and private stakeholders such as vehicle manufacturers, service providers, road operators and telecom companies and suppliers, the platform discussed technical and legal issues to ensure interoperability of C-ITS across borders and along the whole value chain. Furthermore, most likely and suitable deployment scenarios have been identified and resulted in the European Strategy on Cooperative Intelligent Transport Systems, a milestone towards Cooperative, Connected and Automated Mobility (CCAM).
Cooperative ITS Corridor
In the European Cooperative ITS Corridor project, authorities from Germany, the Netherlands and Austria have been working with the automotive industry on the deployment of Car2X Systems and cooperative V2X Services. Along the motorway corridor from Rotterdam via Frankfurt/Main to Vienna, two cooperative ITS Day 1 applications have been tested and introduced: Road Work Warning and Prove Vehicle Data for improved traffic management.
ECo-AT
ECo-AT (European Corridor – Austrian Testbed for Cooperative Systems) was the Austrian project to create harmonised and standardised cooperative ITS applications jointly with partners in Germany and the Netherlands. The major goal was to finalise technical and organisational harmonisation between industry partners and road operators before deploying C-ITS based services. The project ECo-AT consisted of 2 phases: in the first phase, cooperative services and systems have been specified and the solutions have been tested by industry, cities and road operators within the framework of a "Living-Lab". In the second phase of ECo-AT, cooperative services and systems have been realised by deploying them within the framework of a live operation.
InterCor
InterCor was a European project (2016 to 2019) which aimed to connect the C-ITS corridor initiatives of the Netherlands C-ITS Corridor, the French corridor defined in the SCOOP@F project, and the United Kingdom and Belgian C-ITS initiatives. The InterCor project achieved a sustainable network of C-ITS corridors providing continuity and serving as a TestBed for Day 1 C-ITS service development and beyond.
European Standardisation Mandate M/453
In 2009 the European Commission addressed the M/453 Standardisation Mandate to CEN, CENELEC AND ETSI in the field of Information and Communication Technologies to support the Interoperability of Cooperative Systems for Intelligent Transport in the European Community. The M/453 was taken by CEN/ISO and ETSI. The minimum set of standards has been finalised 2012/13.
SCOOP@F
SCOOP@F was a French cooperative ITS pilot deployment project that connected approximately 3,000 vehicles with 2,000 kilometres of roads. It consisted of five specific sites with different types of roads: Ile-de-France, "East Corridor" between Paris and Strasbourg, Brittany, Bordeaux and Isère. SCOOP@F Part 2 started in January 2016, included the validations of C-ITS services in open roads, cross border tests with other EU Member States (Spain, Portugal and Austria) and the development of a hybrid communication solution (3G-4G/ITS-G5).
DRIVE C2X
The European DRIVE C2X project (2011 to 2014) strongly built on previous comprehensive assessment and tests of cooperative ITS systems which were considered to be mature enough for large-scale field operational tests. A consistent Europe-wide testing environment for cooperative systems was created, including seven test sites in Finland, France, Germany, Italy, Netherlands, Spain and Sweden. The project developed the testing methodology and assessed the impacts of cooperative systems on users, environment and society.
simTD – Safe Intelligent Mobility Test field Germany
The simTD project (2009 to 2013) was the largest German field test for cooperative vehicle-to-x communication and investigated the contribution of intelligent communication systems to improving road safety and mobility. For this purpose, realistic traffic scenarios have been addressed in a large-scale test field infrastructure around the Hessian metropolis Frankfurt am Main and the political, economic and technological framework conditions for a successful introduction of vehicle-to-vehicle and vehicle-to-infrastructure networking have been prepared.
PROMETHEUS
The PROMETHEUS (PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety) project was performed from 1986 to 1994. The definition phase was followed by three sub-projects focusing on vehicular technologies, holistic solutions for solving traffic challenges and vehicle-to-vehicle communication. The results of the project built the basis for successive automotive innovations, like navigation, assistance systems, cooperative ITS and automated driving.
C-ITS Background
The CAR 2 CAR Communication Consortium has compiled some further detailed background information on C-ITS with special focus on safety related use cases and connectionless short-range communication.
- The frequently answered questions (C-ITS FAQs) support you in better understanding the main features and technical details of the cooperative system developed by the Consortium and being deployed in Europe.
- Scientific papers (C-ITS Papers) related to the ad-hoc WLANp communication standards IEEE 802.11p and its successor NGV standard IEEE 802.11bd are made available by searching with Google Scholar.
- The C-ITS domain uses a lot of abbreviations (C-ITS Glossary) which usually is confusing and sometimes the meaning of some abbreviations is fuzzy requiring some specification of the terms used.
By nature, the C-ITS FAQs, C-ITS Papers and the C-ITS Glossary are comprehensive but not complete and will be therefore updated from time to time.
Discover the Pilot PKIs

The CAR 2 CAR Communication Consortium provides Public Key Infrastructures (PKIs) ready-to-use by active CAR 2 CAR members. These ECTL Level 0 registered Pilot-PKIs provide digital certificates for vehicles or infrastructures as a necessary component of V2V communication systems.
EU Root CA
Access to the EU Root CA & PKI. A very complete knowledge base with everything you should know about the central European C-ITS PKI.