About Cooperative Intelligent Transport Systems (C-ITS)
Cooperative Intelligent Transport Systems (C-ITS) enable communication and cooperation between vehicles, infrastructure and other road users to improve road safety, traffic efficiency and sustainability.
By exchanging relevant information such as position, speed and road events, connected road users can better anticipate traffic situations, react earlier and support smoother and safer mobility.
C-ITS is a key enabler of connected and increasingly automated transport systems in Europe.
What C-ITS enables
C-ITS allows connected road users and infrastructure systems to share and receive information in real time, supporting:
- improved road safety through earlier hazard awareness
- more efficient and predictable traffic flow
- reduced energy consumption and emissions
- improved driving comfort
- better protection of vulnerable road users
It supports both everyday traffic situations and complex cooperative scenarios involving multiple types of road users.
Vehicle-to-Everything (V2X) communication
C-ITS is based on Vehicle-to-Everything (V2X) communication, enabling information exchange between:
- vehicles (V2V)
- vehicles and infrastructure (V2I)
- vehicles and vulnerable road users (V2P)
- vehicles and network services (V2N)
V2X enables continuous cooperation between vehicles, infrastructure and other road users, forming the communication backbone of C-ITS.
From awareness to cooperation
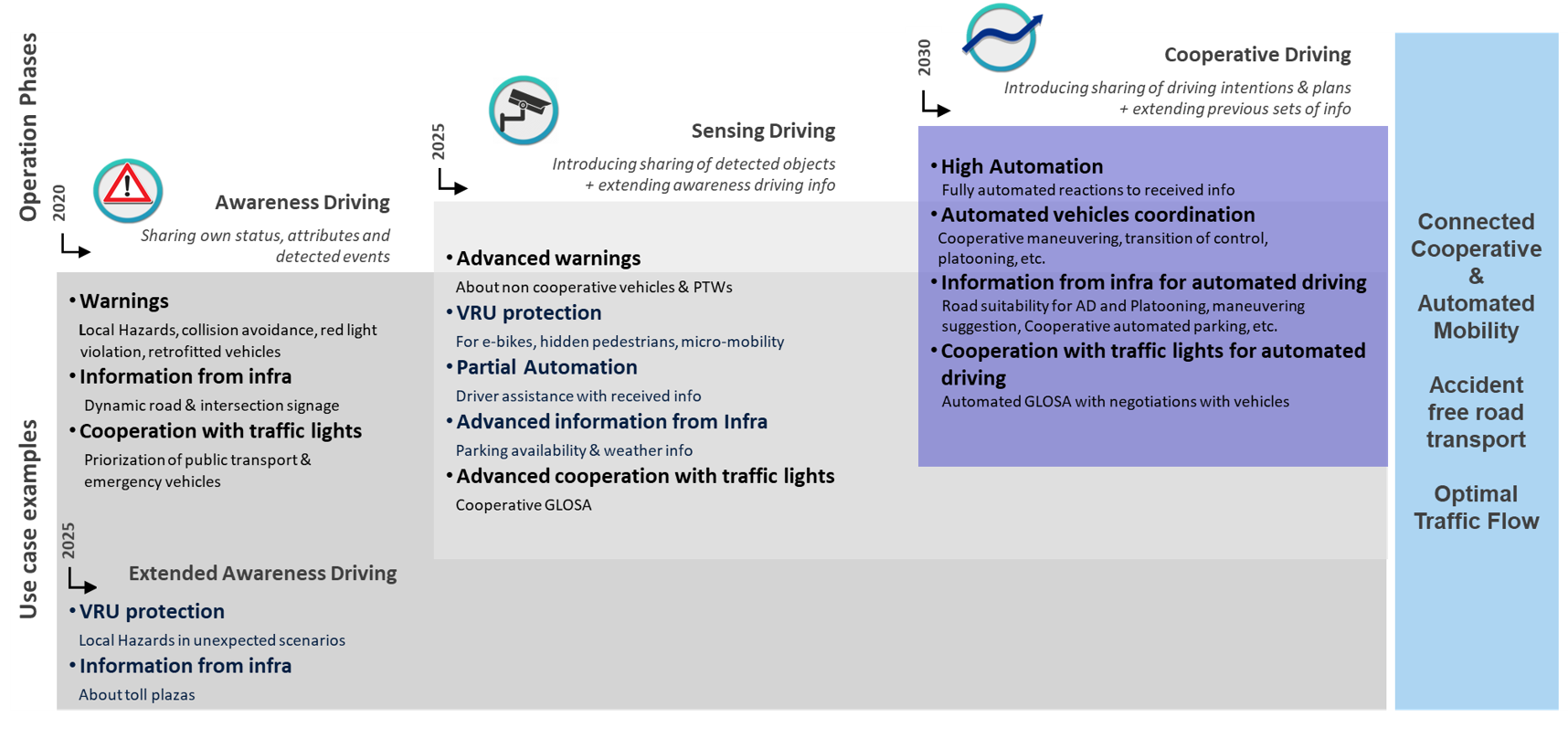
C-ITS services evolve progressively from basic information exchange to advanced cooperative functions:
Day 1 – Awareness and information
Connected road users receive warnings and traffic information that support safer and more foresighted driving.
Day 2 – Enhanced perception and awareness
Vehicles and infrastructure share additional information to improve understanding of the surrounding traffic environment.
Day 3+ – Cooperation and coordination
Road users and systems begin to share intentions and coordinate behaviour, enabling advanced cooperative and automated driving functions.
The C-ITS ecosystem
C-ITS deployment involves a broad ecosystem of stakeholders working together to ensure interoperability across Europe:
- vehicle manufacturers
- infrastructure equipment manufacturers
- suppliers
- road operators
- public authorities
- research organisations
Interoperability between these stakeholders is essential to ensure that C-ITS services work seamlessly across borders and between different systems.
How interoperability is achieved
C-ITS interoperability requires more than communication technology alone. It is achieved through a structured framework combining standards, deployment specifications and testing.
In summary:
- European and international standards define the technical capabilities and options
- Deployment specifications (BSP framework) define consistent implementation rules to ensure interoperability
- Testing and validation activities ensure that implementations work together in practice
This combined approach enables interoperable deployment across Europe.
The role of the CAR 2 CAR Communication Consortium
The CAR 2 CAR Communication Consortium brings together industry and public stakeholders to support interoperable C-ITS deployment in Europe.
Its main role is to develop and maintain deployment specifications that ensure consistent implementation of C-ITS standards across different manufacturers, systems and countries.
This includes:
- development of implementation and interoperability specifications (BSP framework)
- support for security and trust frameworks
- contribution to interoperability testing and validation activities
coordination with European initiatives such as C-ROADS for infrastructure alignment
Standards and regulatory framework
C-ITS is based on European and international standards developed by organisations such as ETSI, CEN and ISO.
These standards are complemented by relevant European policy and regulatory frameworks, including initiatives such as the ITS Directive and the Radio Equipment Directive.
Together, they provide the foundation for safe, secure and interoperable C-ITS deployment across Europe
Evolution towards deployment
C-ITS is continuously evolving through:
- research and innovation projects
- large-scale pilots and field operational tests
- interoperability testing and Plugtests
- early and ongoing deployment in real traffic environments
- continuous updates of deployment specifications
This iterative process ensures that C-ITS services remain aligned with technological progress and real-world operational experience.
Towards connected and cooperative mobility
C-ITS is a foundational technology for connected and automated mobility in Europe.
By enabling secure and interoperable communication between all road users and infrastructure, it supports the transition towards safer, more efficient and more sustainable transport systems.
Further information on interoperability, deployment specifications, security frameworks and testing can be found in the related sections of this website.
C-ITS Services
The CAR 2 CAR Communication Consortium is committed to saving lives by aiming to assist accident free traffic (vision zero) as soon as possible. For reaching this ambitious goal a service and use case roadmap clusters innovation phases building on each other and supporting all SAE levels of automation. Day 1 services focus on exchanging information enhancing foresighted driving. Day 2 services improve the service quality and share perception and awareness information. Day 3+ adds further sophisticated services like sharing intentions, supporting negotiation and cooperation that paves the way towards cooperative accident free automated driving.
The cooperative V2X services also enable truck platooning by allowing smaller headways between trucks for reducing air resistance and lowering fuel consumption. The principle of platooning can be applied on motorways but also at cooperative intersections in urban areas for increasing the throughput during the green phase of the traffic light signal.
Thanks to the work of the CAR 2 CAR Communication Consortium members, e.g. on open European standards for cooperative V2X communication, on specifications, on testing and validation procedures and on the security and privacy concept, the cooperative V2X communication system is mature and enables seamless evolution. The deployment of the cooperative V2X services proceeds in different innovation phases, starting with Day 1, a basic set of information and warning services support low penetration rates of C-ITS capable road users during the market introduction.
Day 1 services are being deployed and are already available in cooperative V2X vehicles on European roads. Services related to phases of Day 2 and Day 3+ are investigated in R&D projects that are generating the knowledge for developing related customised functions and standards. Having tested and demonstrated the new functionalities and enabling technologies, the innovations are fed into standardisation and profiling of the next deployment phase.
Some of the illustrations of use cases are shown below.
Awareness Driving
The exchange of status data via cooperative V2X communication, e. g. the position, speed, driving direction or special incidents like a vehicle defect, enables a set of information and warning services. They support road users in driving with foresight and get aware of potential risks which are not yet visible to them.
Examples are:
- Intersection Collision Warning
- Emergency Vehicle Warning
- Dangerous Situation Warning
- Stationary Vehicle Warning
- Traffic Jam warning
- Pre-/Postcrash Warning
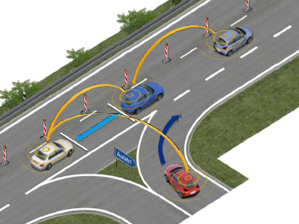
Cooperative Driving
In addition to status and sensor data, cooperative V2X road users can also provide intention data, allowing them to interact intelligently and to coordinate their behaviour even in complex traffic situations. The prediction of expected behaviour of all road users is an important requirement for the long-term goal of highly automated and autonomous driving.
Examples are:
- (Static or dynamic) Platooning
- Area reservation
- Cooperative Merging
- Cooperative Lane Change
- Cooperative Overtaking
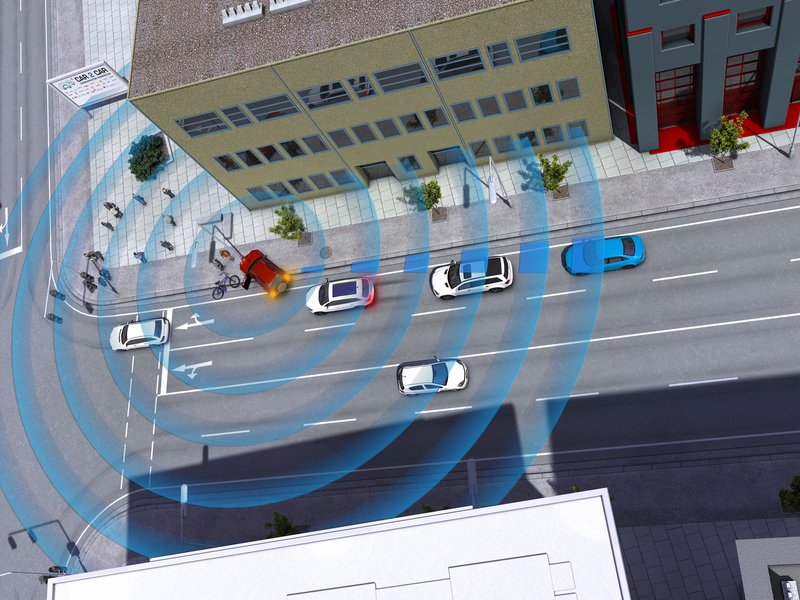
Sensing Driving
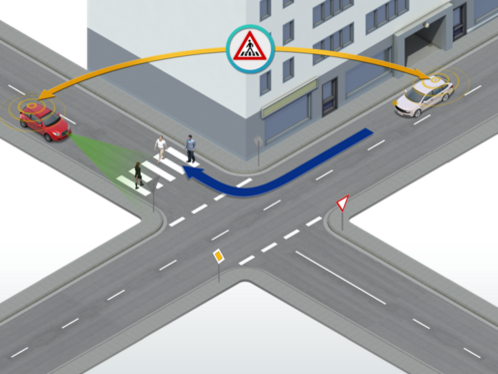
On top of status data, cooperative V2X capable road users can share observations gained by sensors, and advanced environmental information. This way, other traffic participants are not only warned against dangers they cannot perceive themselves yet; also, non-communicating road users are taken into account and protected in different traffic situations.
Examples are:
- Overtaking Warning
- Extended Intersection Collision Warning
- Vulnerable Road User Warning
- Cooperative Adaptive Cruise Control
- Long-term Road Works Warning
- Special Vehicle Prioritisation
European C-ITS Trust Framework
Trust is fundamental to Cooperative Intelligent Transport Systems and Services (C-ITS). Vehicles, roadside infrastructure and other C-ITS participants exchange safety-related information that must be authentic, reliable and protected against manipulation. At the same time, the system must safeguard the privacy of road users.
Europe has established a harmonised Public Key Infrastructure (PKI) trust framework that enables C-ITS participants to verify digitally signed messages while protecting privacy through the use of pseudonymous certificates. This common trust framework supports secure and interoperable C-ITS deployment across Europe.
To support both operational deployment and continuous innovation, two complementary PKI environments are available:
- The European C-ITS Security Credential Management System (EU CCMS) for operational C-ITS deployments.
- The CAR 2 CAR Pilot PKI for development, testing and interoperability validation by members of the CAR 2 CAR Communication Consortium.
Together, these environments support the complete lifecycle of secure and interoperable C-ITS deployment—from development and testing through to operational deployment on European roads.
The CAR 2 CAR Communication Consortium provides Public Key Infrastructures (PKIs) ready-to-use by active CAR 2 CAR members. These ECTL Level 0 registered Pilot-PKIs provide digital certificates for vehicles or infrastructures as a necessary component of V2V communication systems.
Pilot PKI in Member Portal:

EU Production Environment CCMS
European C-ITS Security Credential Management System (EU CCMS)
The European C-ITS Security Credential Management System (EU CCMS) provides the production trust framework for operational C-ITS deployments throughout Europe.
The framework is governed by the European Commission and is centred around the European Central Trust List Manager (TLM). The TLM maintains and distributes the European Certificate Trust List (ECTL), enabling C-ITS participants to establish trust in authorised Root Certification Authorities (Root CAs) operating within the European trust framework.
The EU CCMS provides the trust foundation for interoperable C-ITS deployments by ensuring:
- Authenticity – received messages originate from trusted C-ITS participants.
- Integrity – digitally signed messages can be verified as unmodified.
- Privacy – pseudonymous certificates help protect road users against long-term tracking.
- Cross-border interoperability – vehicles and roadside infrastructure can securely communicate across national borders using a common European trust model.
Further information about the EU CCMS, the European Certificate Trust List (ECTL), governance arrangements and applicable policies is available from the European Commission's C-ITS Point of Contact (CPOC).
European C-ITS Point of Contact (CPOC): https://cpoc.jrc.ec.europa.eu/
Testing & Development Environment – CAR 2 CAR Pilot PKI
The CAR 2 CAR Pilot PKI is provided as a service to members of the CAR 2 CAR Communication Consortium to support development, testing and interoperability validation before operational deployment.
The Pilot PKI mirrors the architecture and operational principles of the European production trust framework, allowing member organisations to validate implementations and perform interoperability testing in a dedicated pre-production environment without affecting live operational deployments.
The Pilot PKI supports activities such as:
- development and integration of C-ITS implementations;
- interoperability testing between vehicles, roadside infrastructure and backend systems;
- validation of security implementations;
- participation in interoperability events and Plugtests;
- preparation for operational deployment within the European C-ITS trust framework.
The Pilot PKI is technically operated by Microsec on behalf of the CAR 2 CAR Communication Consortium, providing members with a professionally managed and reliable testing environment.
Information on accessing the Pilot PKI service, documentation and member support is available through the CAR 2 CAR member portal.
Pilot PKI in Member Portal:
Complementary Roles Supporting Secure C-ITS Deployment
Secure and interoperable C-ITS deployment relies on close collaboration between European institutions, industry and technical service providers.
The European Commission governs the production trust framework through the EU CCMS, including the European Central Trust List Manager (TLM) and the European Certificate Trust List (ECTL), providing the trust foundation for operational C-ITS deployments across Europe.
The CAR 2 CAR Communication Consortium supports interoperable deployment by offering the Pilot PKI as a service to its members, developing security implementation specifications, interoperability profiles, and conformance and interoperability test specifications. These activities help ensure that security mechanisms are implemented consistently across vehicles and infrastructure before operational deployment.
The Pilot PKI is technically operated by Microsec, providing a stable and trusted environment for development, testing and interoperability validation that complements the European production trust framework.
Together, these complementary roles help ensure that secure and interoperable C-ITS services can be deployed consistently across Europe while supporting continuous innovation and future evolution.